
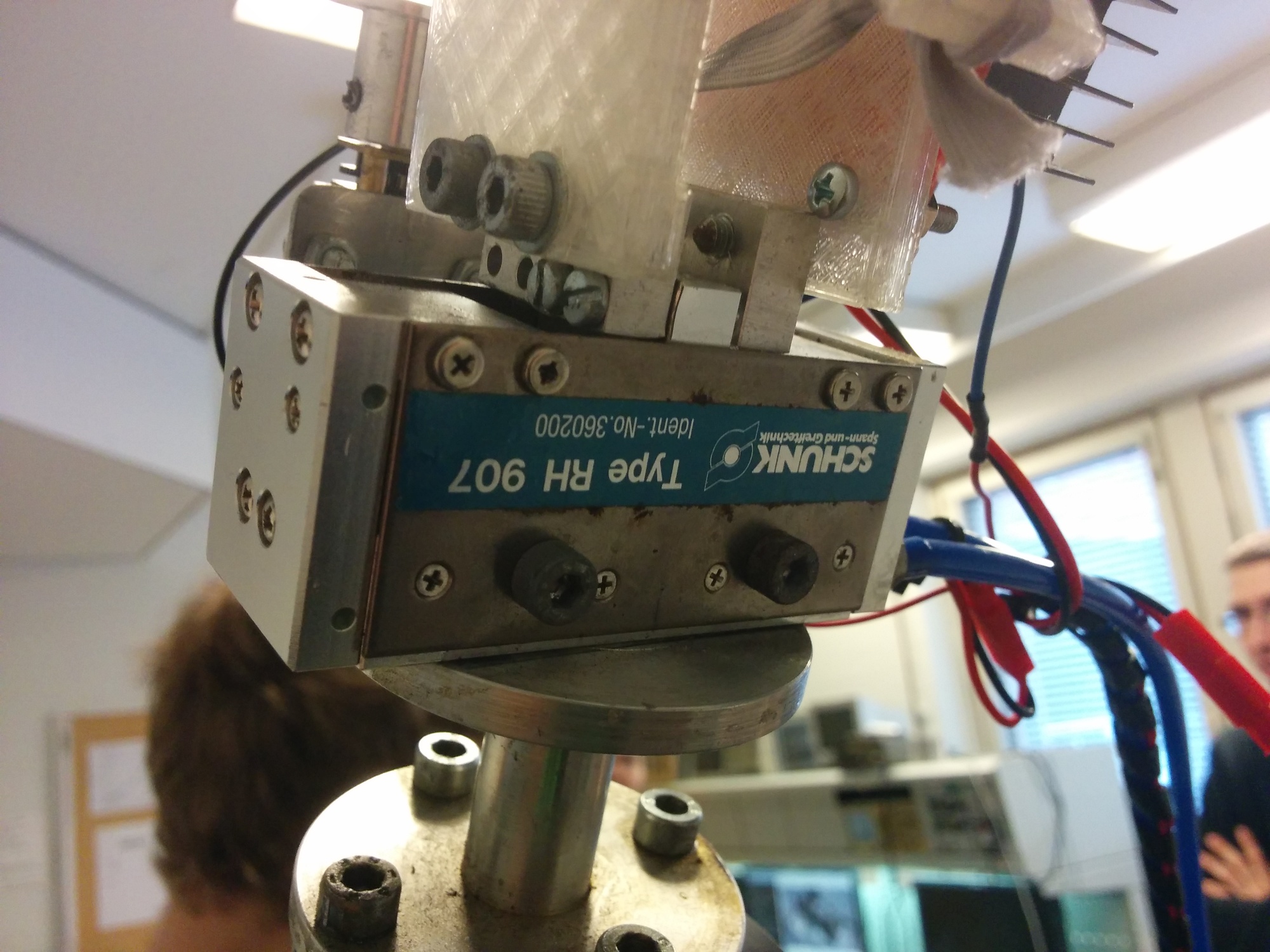
Saatiin killalle se vanha robokäsi aiemmin, mutta jäi sen säätäminen kunnollisten moottoriohjainten puutteessa vähän tauolle. Nyt sitten arvottiin, että jospa saatais killalle sponssirahaa, niin kehtais tehdä itse modernit ohjaimet. Sitten muutama nuorempi killisti tuossa tunkkasi juuri ennen wappua kun tuli jostain hyvä idea että laitetaan se kaatamaan kuohuviintä vappupäiväksi Ullanlinnanmäelle - itse tällä kertaa lähinnä dokumentoin ja konsulteerasin töiden rajoittaessa elämää. Elektroniikan aivotyö keskittyi projektissa vain noin yhdelle hengelle, minkä johdosta on aika kumma juttu että homma ehdittiin ylipäätään saamaan valmiiksi, ja viimeisen tunkkauksen ja oheisinfran kuten puurakenteiden hankinnan jälkeen saatiin kuin saatiinkin juttu toimimaan viimeisenä iltana. Ulliksella kaikki meni suunnilleen hyvin.
Projekti eteni jokseenkin kolmessa vaiheessa. Ensin tkln mietti ohjausta jo syksyllä, sitten saatiin sponssipäätös ideana "robokäsi vapuksi ullikselle", ja sit tunkattiin hirveällä kiireellä. Viimeinen vaihe jakautuu edelleen kronologisesti kahtia vaiheisiin "kiireellä" ja "okei ei nukuta viikkoon". Respect. Ohjauselektroniikat ja niihin liittyvä softa (jotka tkln dokumentoi tuon linkin takana tarkemmin) olivat itsessään jo melkoinen homma tunkata itse tyhjästä, ja lisäksi hökötykselle dyykattiin hyvää ja huonompaa puuta baaripöydäksi tai sen kaltaiseksi, ja 3d-tulostettiin erinäisiä osia pullonpitimeksi pöydälle ja tuohon paineilmalla toimivaan manipulaattoriin.
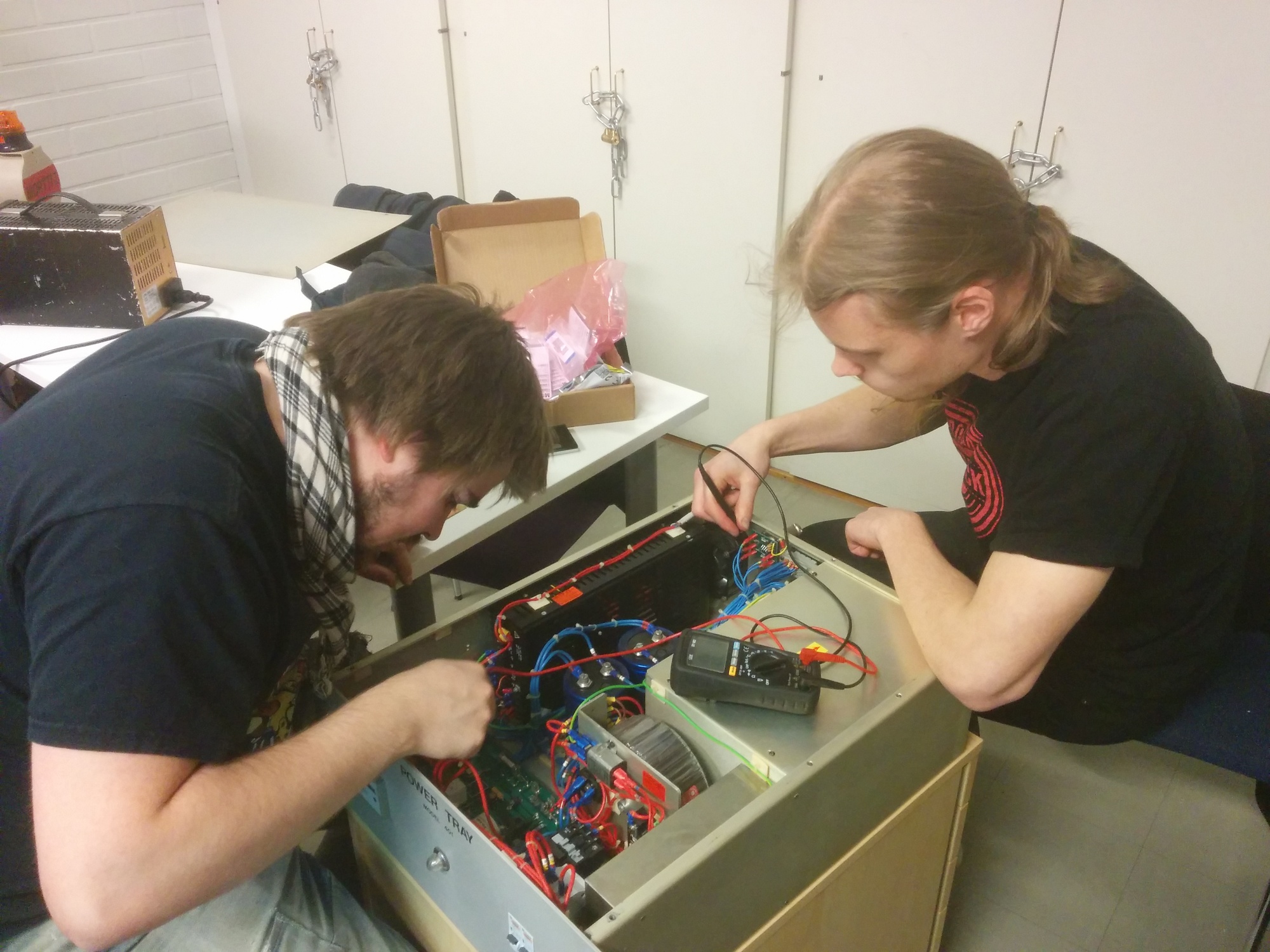
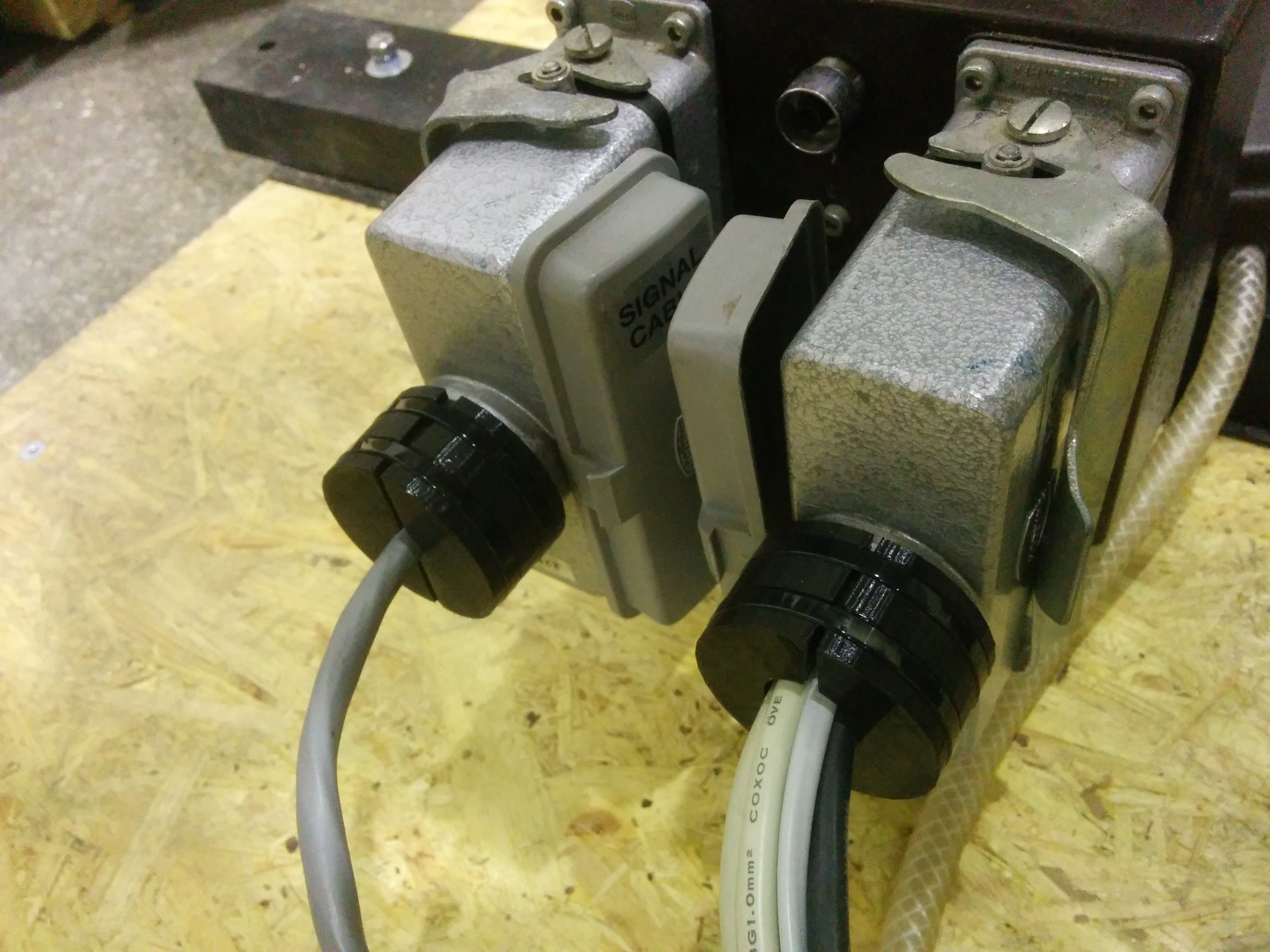
Jossain vaiheessa aika alussa pohdittiin, että a) kannattaiskohan tuota alkuperäistä teholähdettä käyttää, ja b) jos, niin miten sen saa esim. päälle ja käyttöön. Mokoma laatikko kun painaa epäsiedettävän paljon ja sisältää suojalogiikkaa sekä kaikkea turhaa, kuten hakkurin alkuperäiselle tietokoneelle. Systeemin sähköt on suunniteltu alunperin 115 voltille eli jenkkijännitteelle, joten ekaksi mokoma hökötys muuntaa 230 volttia puoliksi aivan naurettavan kokoisella rengassydänmuuntajalla. Varsinainen 24 voltin käyttösähkö moottoreille taas tulee yllättävän pienestä rengassydämestä tämän puolittaisen seinäjännitteen perästä. Suodatus hoituu parilla Iso-Arskan teinivuosien hauiksen kokoisella elkolla, joille on purkuvastukset jotka pitää erikseen kytkeä pois päältä etteivät ala esim. hehkua punaisena.

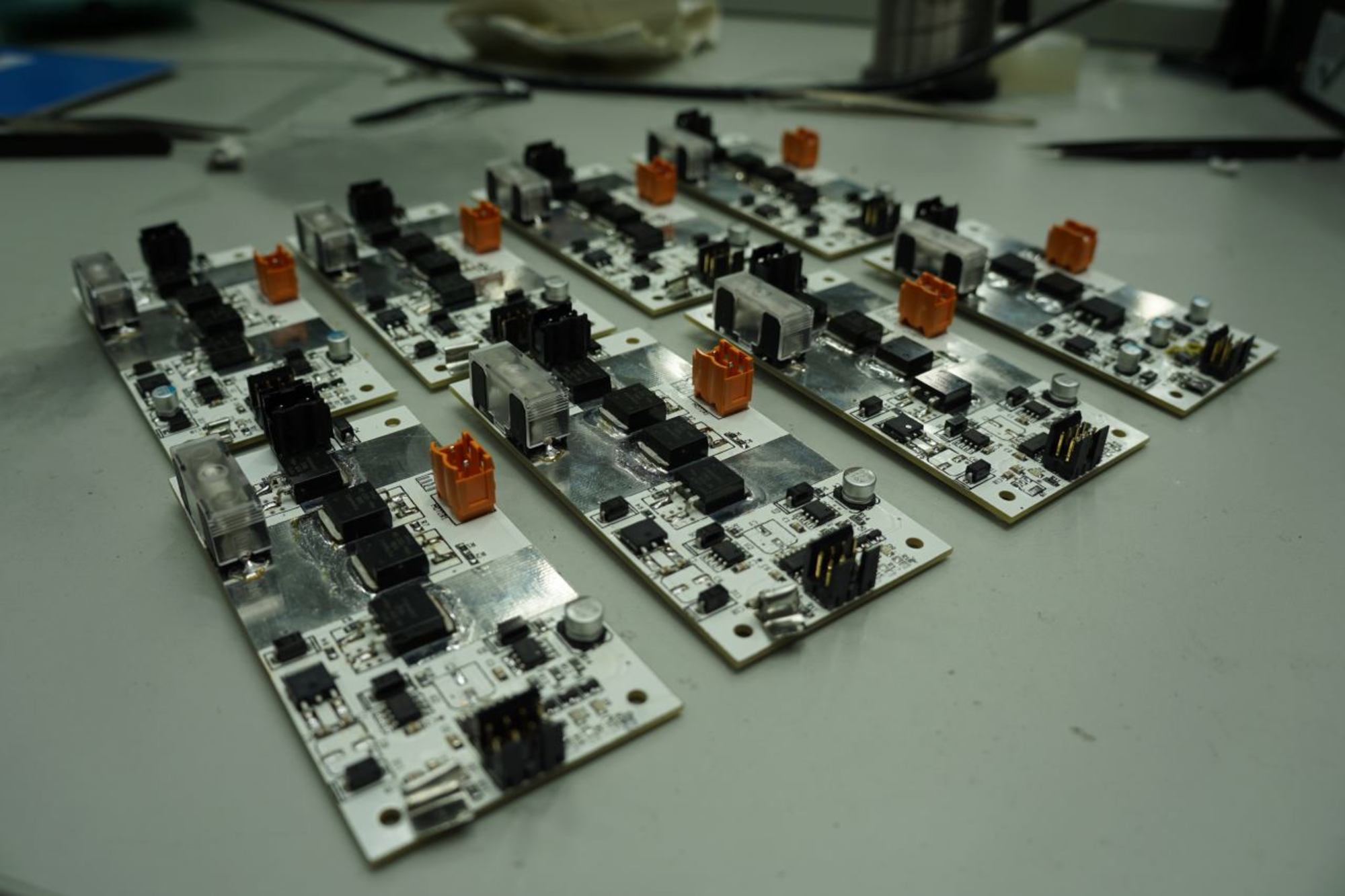
Tkln päätyi säätimissä moderneihin pintaliitosfetteihin noiden alkuperäisten bipolaarien sijaan, joiden jäähdyttäminenkin slurppaisi tuulettimien merkintöjen mukaan noin 100 wattia puhallustehoa muistiinpanojeni mukaan. Valitut fetit saa jäähdytettyä passiivisesti pienilläkin piirilevyillä. Muuntajina käytettiin labrapowereita ajanpuutteen takia kun ei keksitty mistä hankittais ja millainen hankittais, mutta arviolta kilowatin muhennin kannattaisi olla, ja ihan pelkkä muuntaja eikä mitään älykästä hakkuria tms. joka kuitenkin sekoaisi kytkentäpiikeistä.
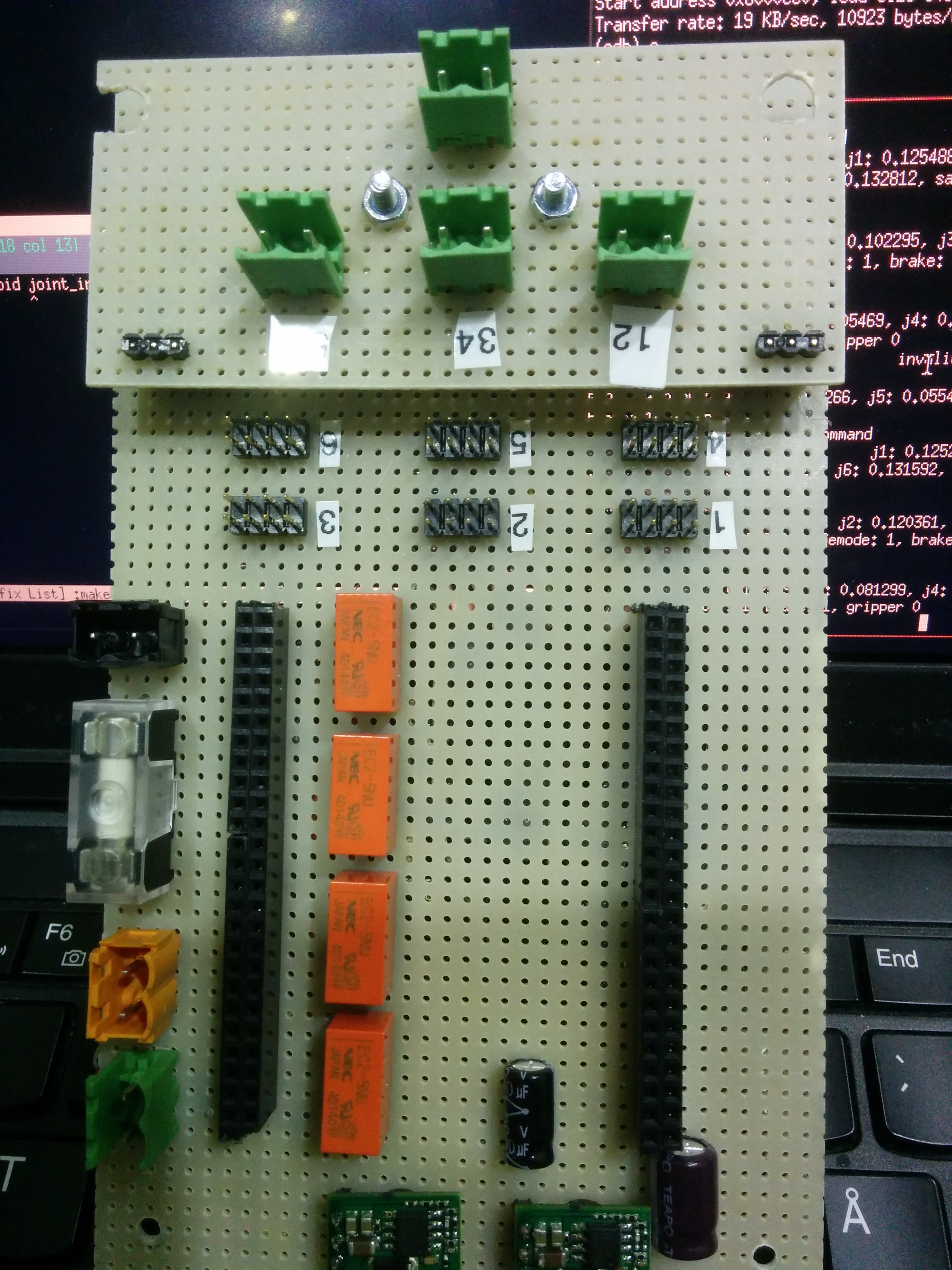
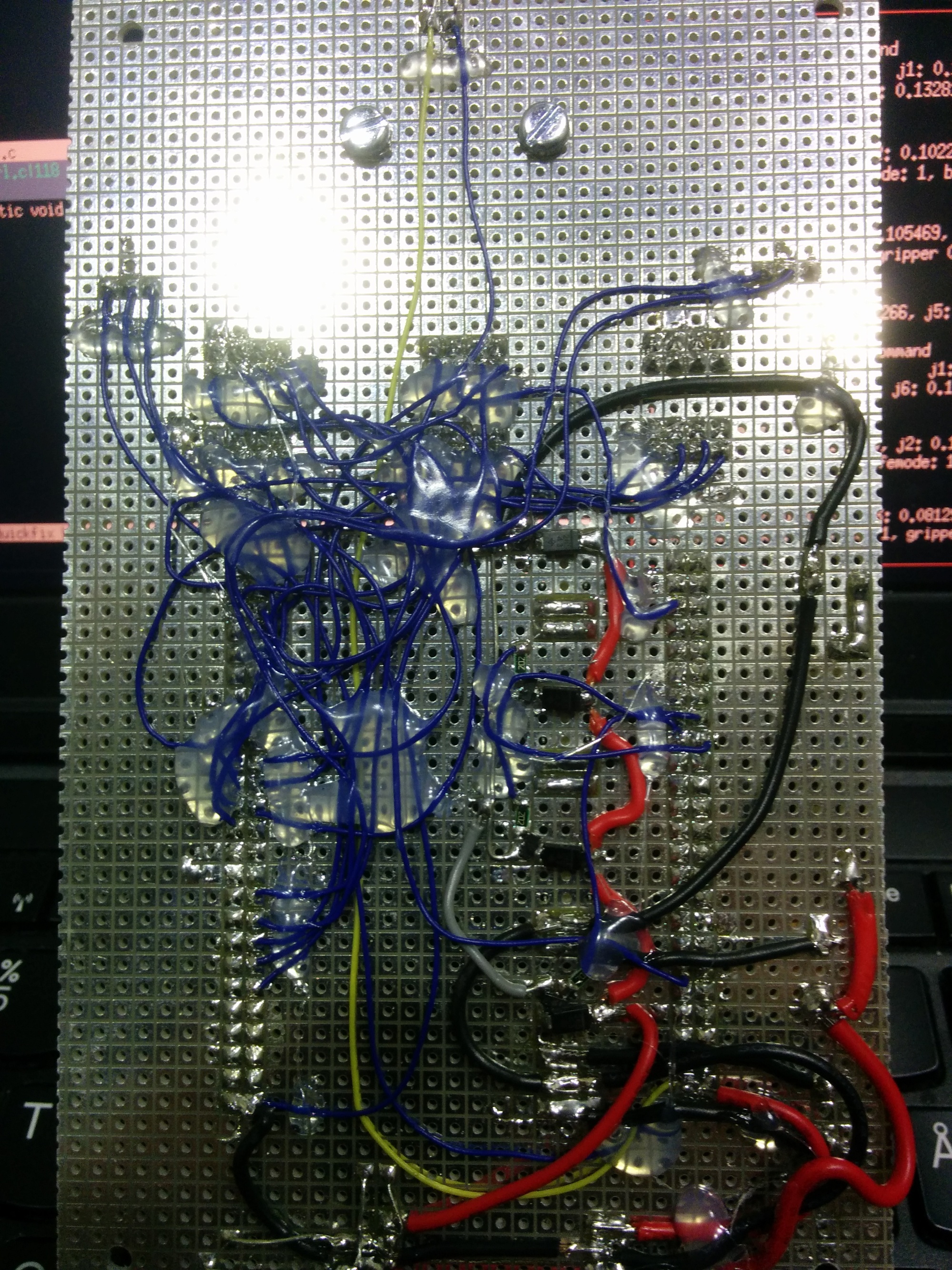
Koska en osaa kirjoittaa, niin tässä seuraa valokuvadumppi viimeisistä hetkistä.


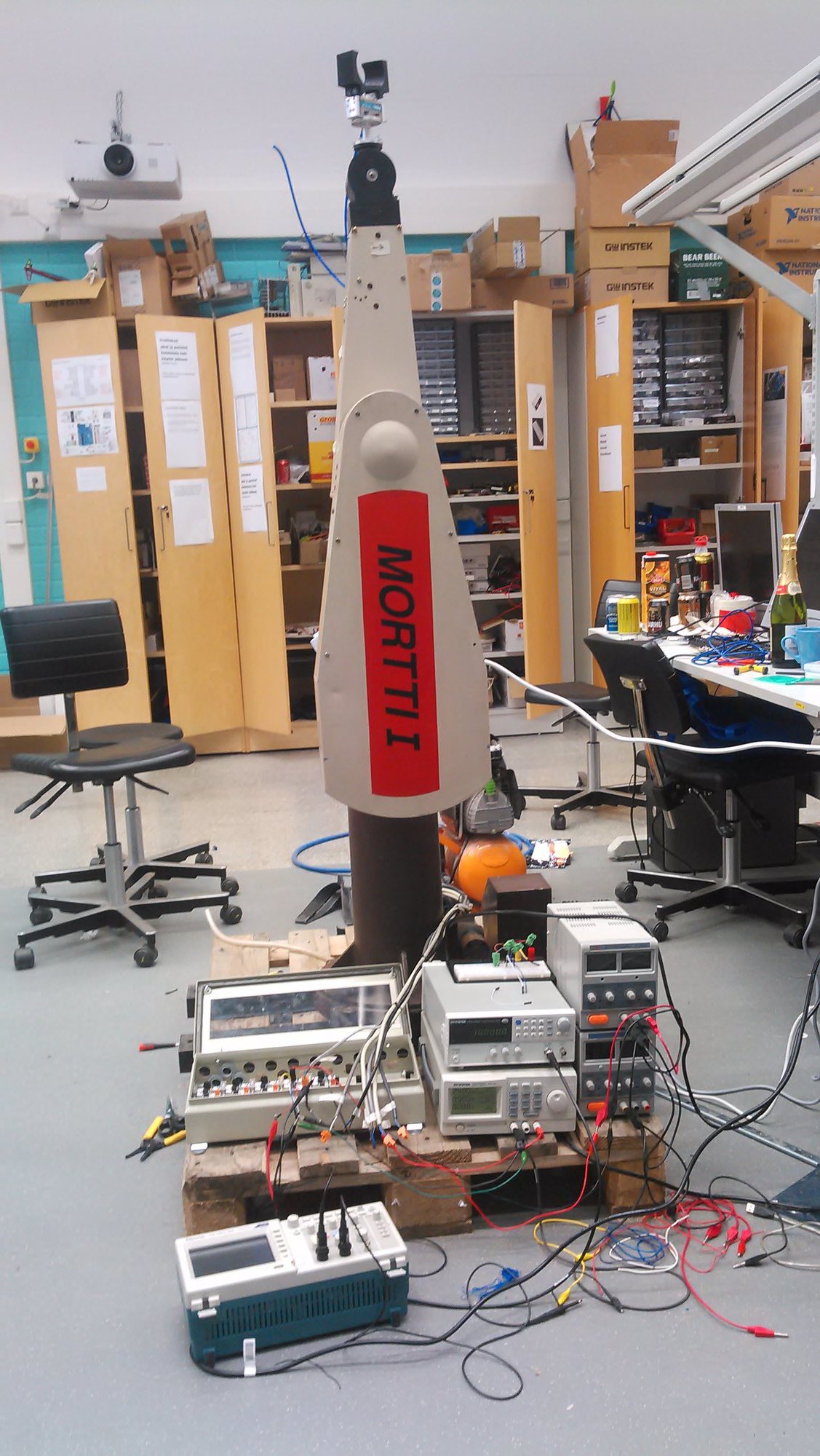




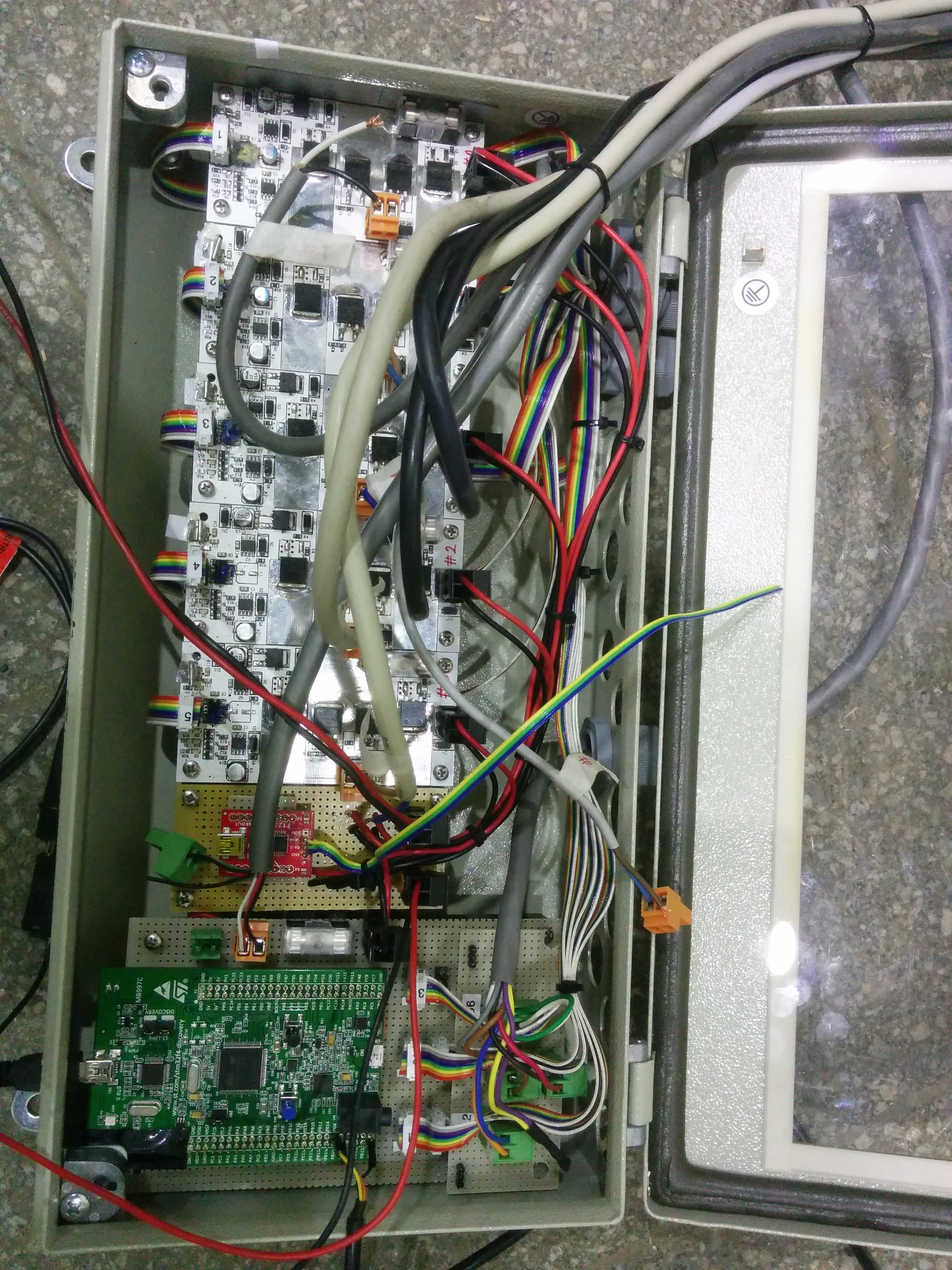







Softa pelasi ihan hienosti tarkoitukseensa ja toimii sarjaportin yli läppäriltä ja juttelee pwm:ää ohjaimille PID-säätimen mukaan per moottori, kuten tkln selittää. PWM kytkeytyy mittauspotikoiden johtoihin ja sen saa karsia pois mediaanifiltterillä, ja lisäksi käytettiin kai myös keskiarvoistusta. STM32 mittaa vikkelään ja robo liikkuu suhteellisen hitaasti, no problemo.
Robolle tallennettiin sekvenssi ennalta käsin ja se kävi matkan pisteet läpi vuorotellen. Vieraat Ulliksella arvostivat, HiQ rahoitti ja näkyi ja meillä oli hauskaa. Eniten aikaa viettäneet tosin saivat levätä ansaitusti aika pitkään tuon jälkeen, ja harkittanee aika tarkkaan että millaisella aikataululla seuraavaan mahdolliseen vastaavaan ryhdytään, sillä tässä tuli useitakin mutkia matkassa. Ohjainlevyille piti syöttää erikseen 3,3 V logiikkajänöä, koska regulaattorit kärvähtivät sillä jokin kurjuus moottoreita kovaa kuormittaessa aiheutti silloin tällöin ikävän latchup-tilanteen, joka pitää vielä debugata ja piti vahtia ohjatessa ja bootata poweri välillä. Devatessa myös kärväytettiin yksi Discovery-lauta. Kaiken kaikkiaan taisi kuitenkin kannattaa.
Protoilusta otin videonkin, tuosta oikeasta käytöstä jostain syystä en (joku muu killan dokumentoijista taisi). Onhan toisaalta aina hauskempaa kun jotain menee rikki:
Eeppistä teekkariutta. Seuraavaksi valitaan vähän sopivampi aikaskaala jatkoprojektille jos/kun sellainen tulee, ja varataan pari testi-iteraatiota piirilevyille jne.
0 kommenttia
Oma kommenttisi
Mielipide tämän sivun asiasta? Kirjoita toki. Älä raapusta kuitenkaan ihan asiattomia juttuja.
Jos on yksityisempää asiaa, tarkkaa kysyttävää tai aihetta pidemmälle keskustelulle, käytä yhteydenottolomaketta kommentoinnin sijaan.
Hölmöt kommentit saatetaan moderoida pois jälkikäteen.