
Puma 560 -robokäsi
22.6.2014 Tagit: robotiikka
Eräs opiskelukaveri onnistui dyykkaamaan Tampereelta vanhan mutta toimivan PUMAn eli 80-luvulta peräisin olevan teollisuuslaatuisen robottikäden. Vekotin painaa kymmeniä kiloja ja mukana tuli painava räkkikaappi täynnä ohjauslaitteita; pyörät on onneksi alla molemmissa. Pidettiin porukalla perjantaiyön säätösessiot ja tutkittiin, mitä käsi ja kaappi olivat syöneet, ja saatiin vehje liikkumaan toistaiseksi ilman ohjauskonetta.
Pikainen googlaus paljastaa, että kyseinen robo on yllättävän tunnettu. Ainakin joku muukin harrastelija on touhunnut vastaavaa. Tämän mukana tullut kaappi ei kuitenkaan näytä ihan alkuperäiseltä vaan vähän hienommalta, eikä se kuulemma ole ihan tämän kanssa käytetty, vaan jonkun vastaavan yksikön. Botista on kuitenkin mark II ja III, ota nyt sitten selvää. Kaappi on uskomattoman hieno katsaus teollisuusautomaation historiaan, ja itse robokäsi on yllättävän mekaaninen eikä sisällä muuta elektroniikkaa kuin moottorit ja anturit, eli alkuperäisen ohjauksen voinee korvata ns. helposti, syöttämällä ohjausta vain itse.
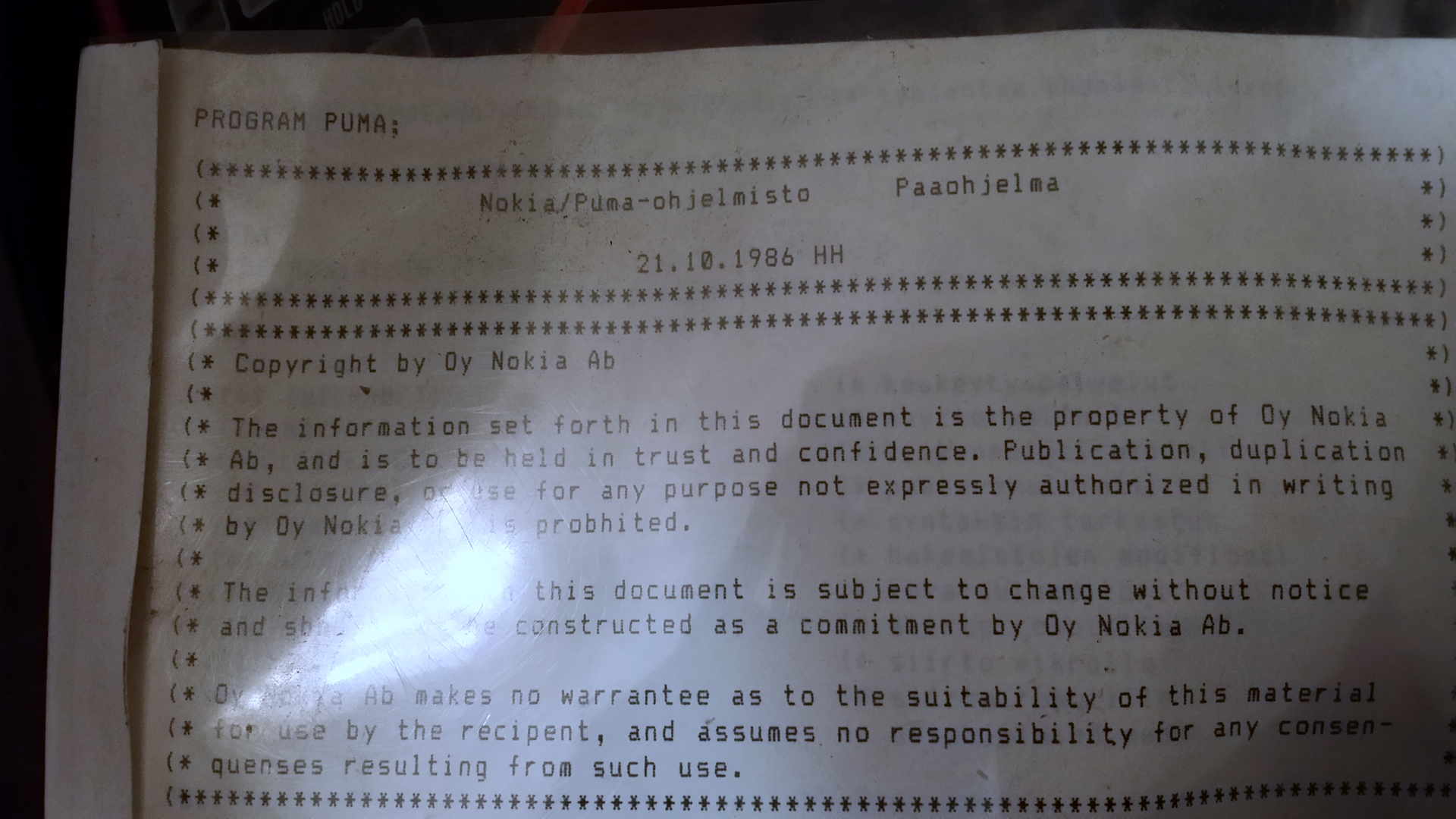
Vekottimessa on Nokian logo useammassakin paikassa, vaikka alkuperäinen valmistaja on internetin mukaan Unimation. Unimation lukee räkkikaapissa monessa kohdassa, ja mukana tullut tulostettu softalistaus saattaa olla jollekin muulle laitteelle.
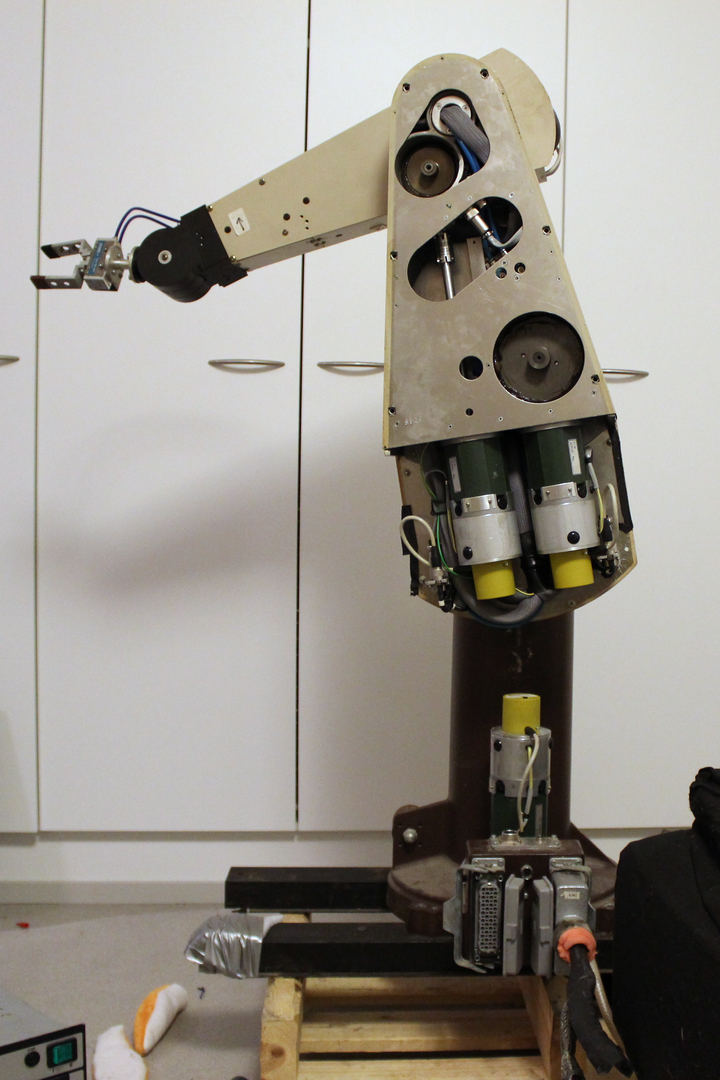
Kädessä on kuusi vapausastetta, kaikki pyörimistä: olkapää pyörii lattian tasossa sekä taittuu ylös-alas, eli kuten ihmisellä, kyynärpää taittuu samassa tasossa muttei pyöri, ja ranteessa on kierto, taitto ja vielä työkalun pyörittäminen. Niveliä ohjaa runkoon piilotetut harjalliset sähkömoottorit, ja jokaisessa on jarru joka pitää kytkeä pois sähköisesti sekä pulssienkooderi. Lisäksi joka nivelessä on yksi potentiometri absoluuttiseen paikan mittaukseen.



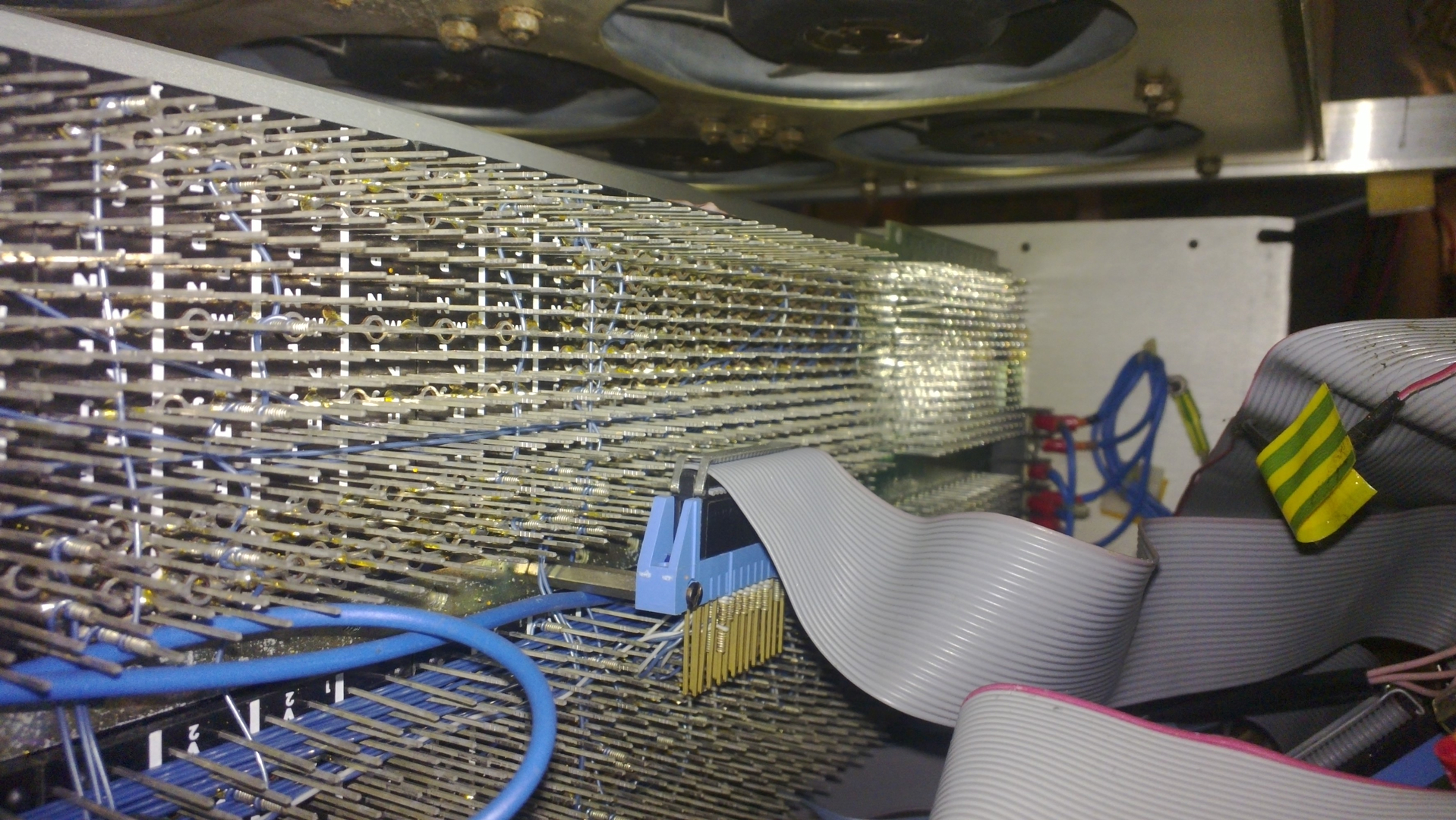
Kaapista löytyy alhaalta ylöspäin listattuna: virtalähde, lerppuasema, tietokone, kytkinpaneeli, moottoriohjaimet, ja jonkinmoinen I/O-moduuli. Johtojen tarkkaa reitityskaaviota ei kirjoitettu muistiin, mutta piuhaa menee paikasta toiseen, I/O-moduuli johon vissiin osa käden liitännöistä menee sisältää jotain antiikkisen oloisia geneerisiä I/O-palikoita (Crydom 6311 ja joku muu, hintaa edelleenkin kymppejä kappaleelta ja niitä on tuolla kymmeniä!) eli vissiin vaan isohkoa tehoa antavia buffereita.


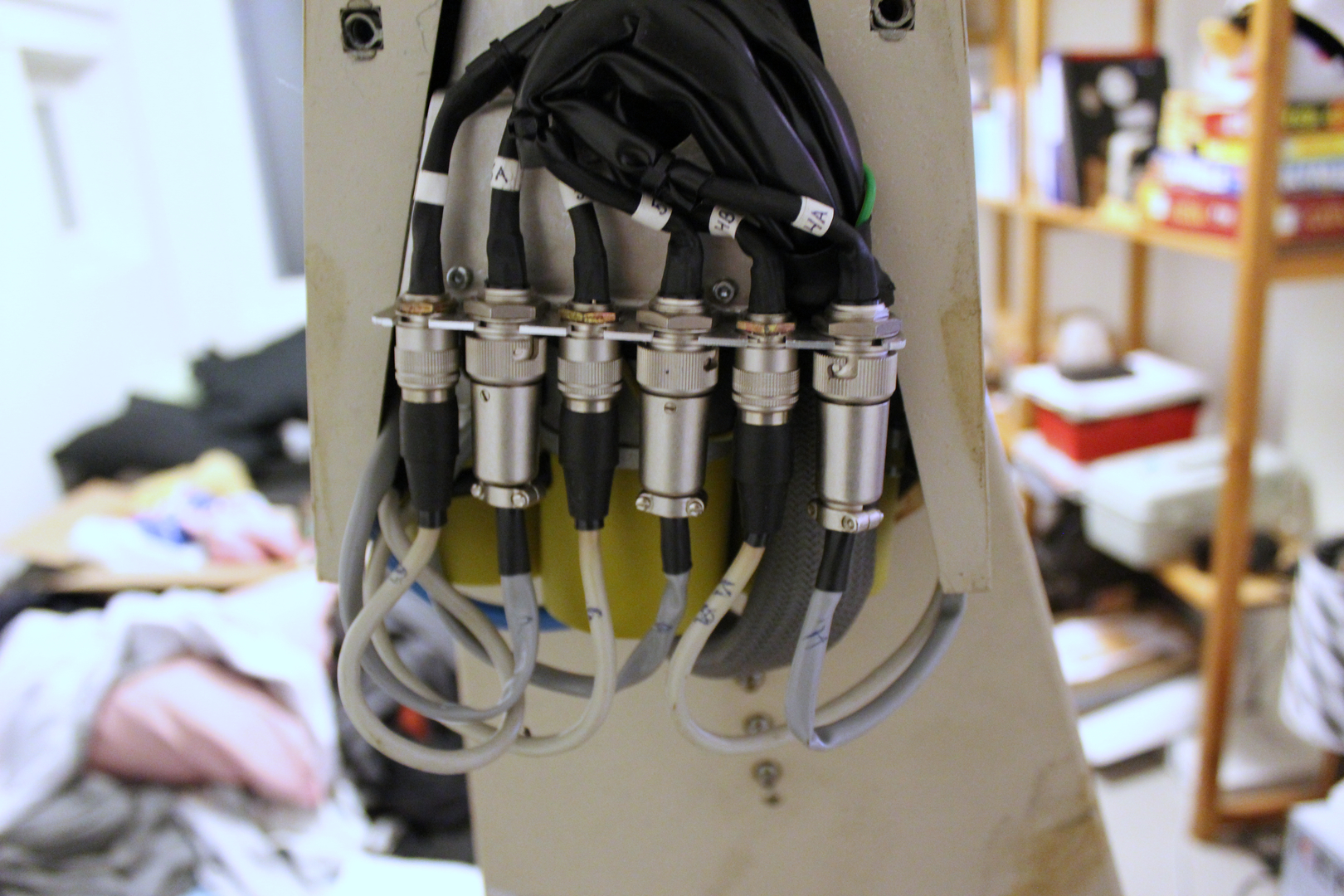
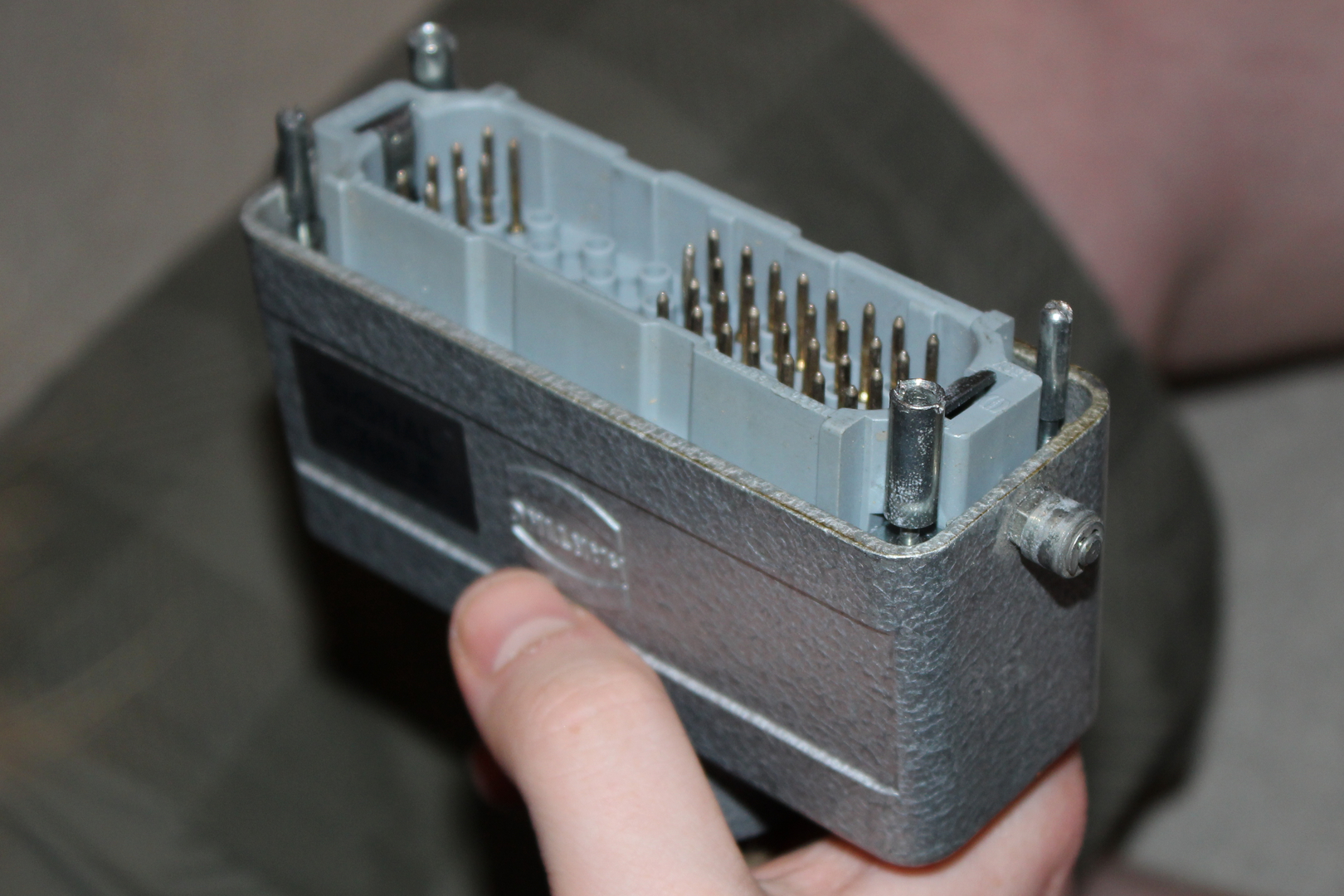
Mukana tuli myös laatikko täynnä kaikenlaista liitäntäjohtoa ja paria käsiohjauskalikkaa sekä papereita. Kaikkia johtoja ei voi kytkeä toisiinsa, sillä kaappi tosiaan on hieman eri botille. Liittimet ovat MILiä tai vastaavaa about kaikkialla.

Tutkittiin kaappia vähän lähemmin ja siirryttiin sitten ihmettelemään käsivartta kun pari jäi tutkimaan kaappia edelleen. Olennaiset asiat kaapissa ylhäältä alaspäin:



I/O-moduulisignaalit menevät jonnekin ja moduulilaatikon naamataulu on täynnä diagnostiikkaledejä. Alapuolella on servodrivereitä, tai miksikä noita takaisinkytkettyjen harjallisten moottorien ohjaimia nyt sanoisikaan.
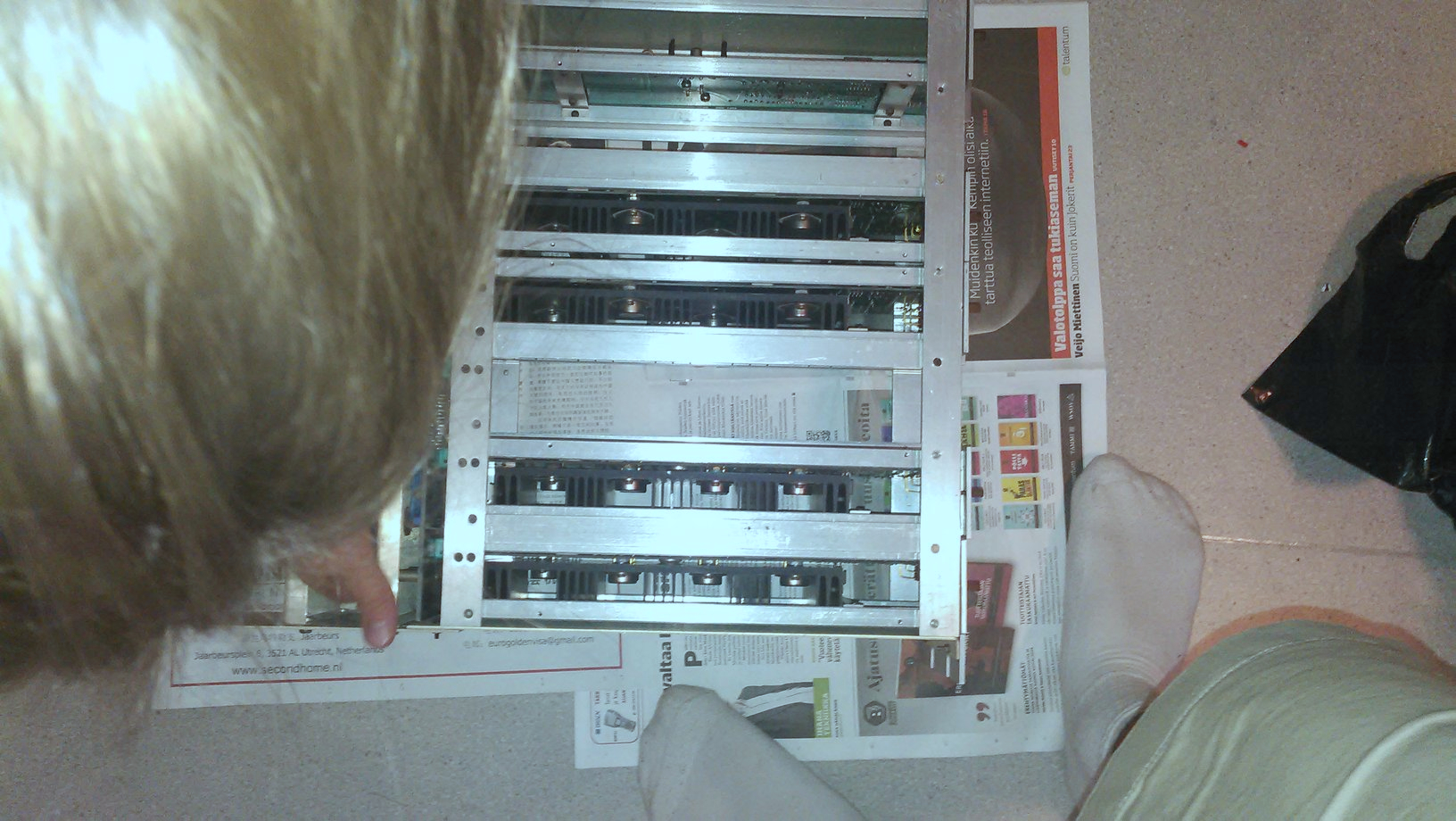




Moduulien rakenne vaikuttaisi siltä, että käyttöjännite (24 V moottoreille, btw) on kaksipuoleinen ja transistorit eivät ole h-sillassa vaan kytkevät vain moottorin yhden karvan positiiviseen tai negatiiviseen jännitteeseen. Jäi vielä selvittämättä, onko ohjaus PWM:ää vai peräti vain lineaarista, johon yksi satunnainen opari ja kasa passiiveja sen vieressä ehkä viittaa. Tehotrankkuja on pienemmille moottoreille neljä ja suuremmille eli olkapään kahdelle mötkölle kuusi jakamassa virran rinnakkain tehovastuksien yli tasattuna.
Nappipaneelin sisään ei jaksettu katsoa tarkemmin. Se ei sisällä kummempaa, lähinnä johtoja noille nappuloille. Paneelin jälkeen löytyy ohjaustietokone.

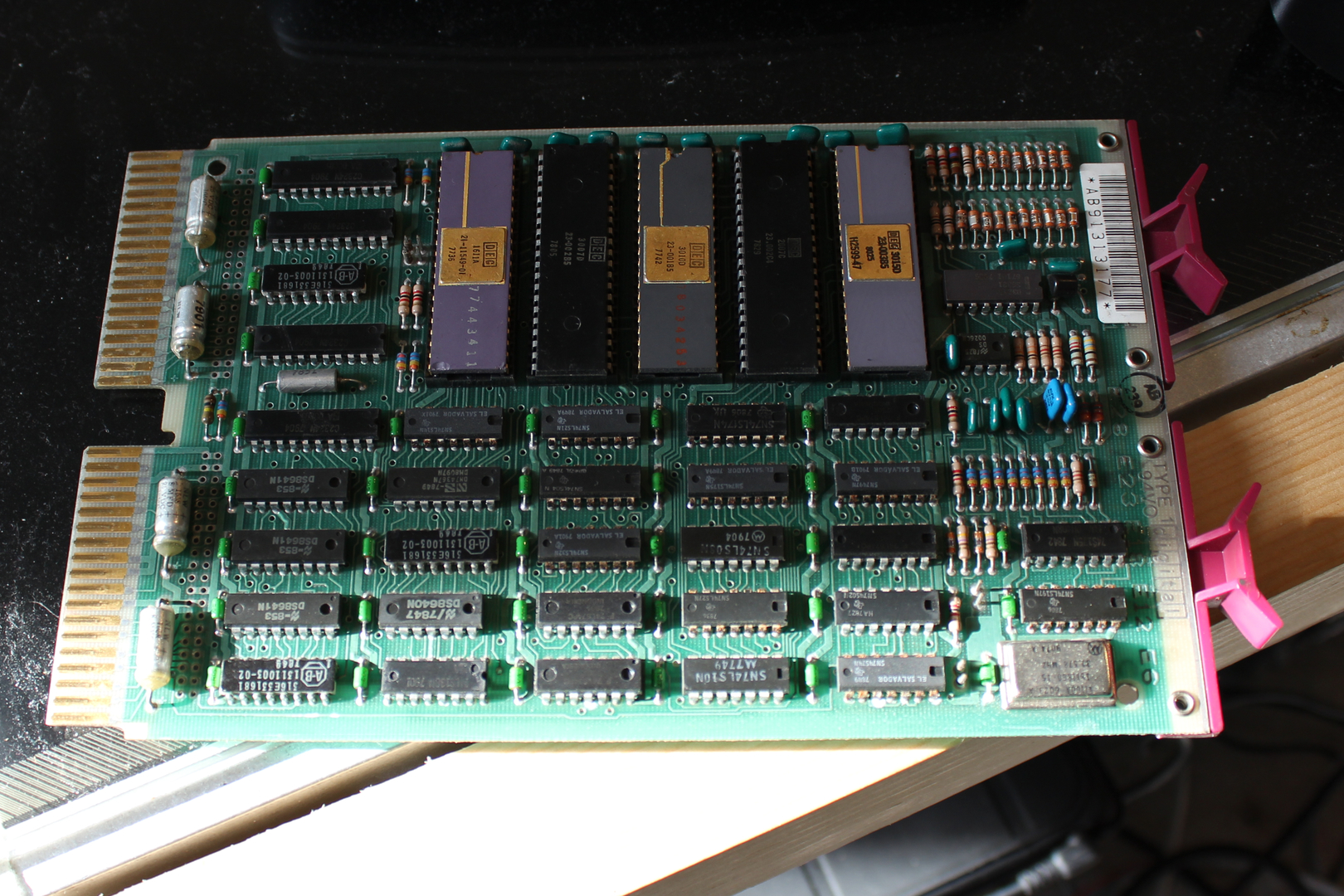
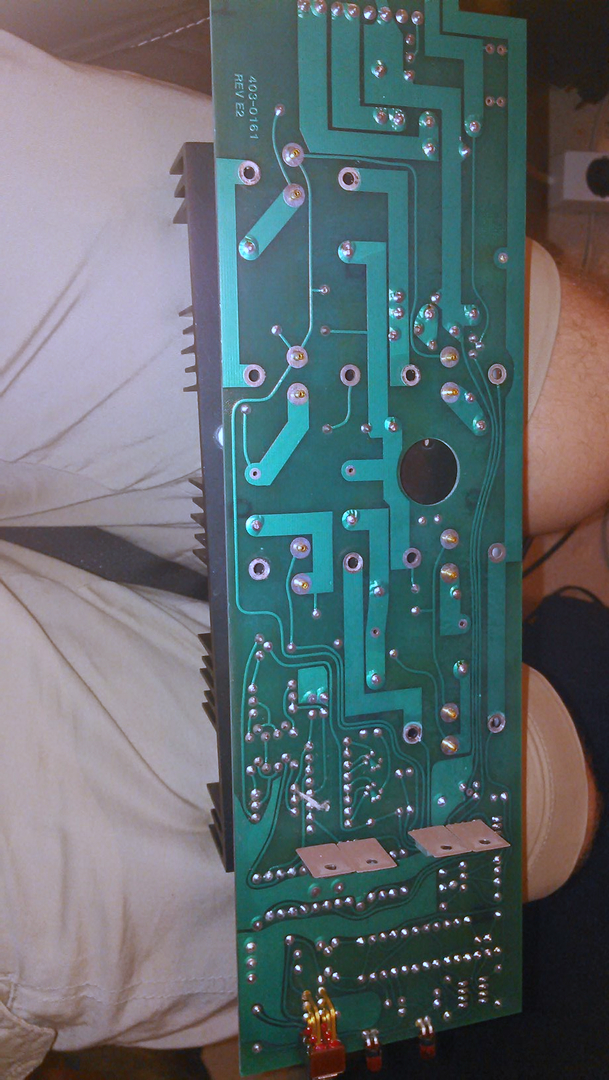
Tietsikka on selvästi PDP-11 vissiinkin Q-bus-väylässä, ja korteissa on ainakin cpu, sitä sun tätä muistia (osa vuotaneilla varmistusparistoilla varustettuna) ja reippaasti I/O:ta. Lerppuaseman laatikossa ei ole aseman lisäksi muuta, eikä ole hajuakaan millaista dataa siitä luetaan. Laite kylläkin googlautuu mainiosti, eli jos tuota ehtisi hakkerihistorioitsijamielessä tutkia, niin saisi varmaan pyörimään alkuperäisraudalla. Lienee silti parempi modernisoida mm. tilanviennin takia.

Virtalähde on säästämisen arvoinen, sillä moottorit imevät varmaan aika lailla tehoa. Sisältä löytyy iso rengassydänmuuntaja, vielä isompi (tuon warning-tarran alta), jättielkoja, kontaktori, ihan modernin näköinen vissiin hakkuripoweri, automaattisulakkeita, ja jotain pikkuelektroniikkaa.
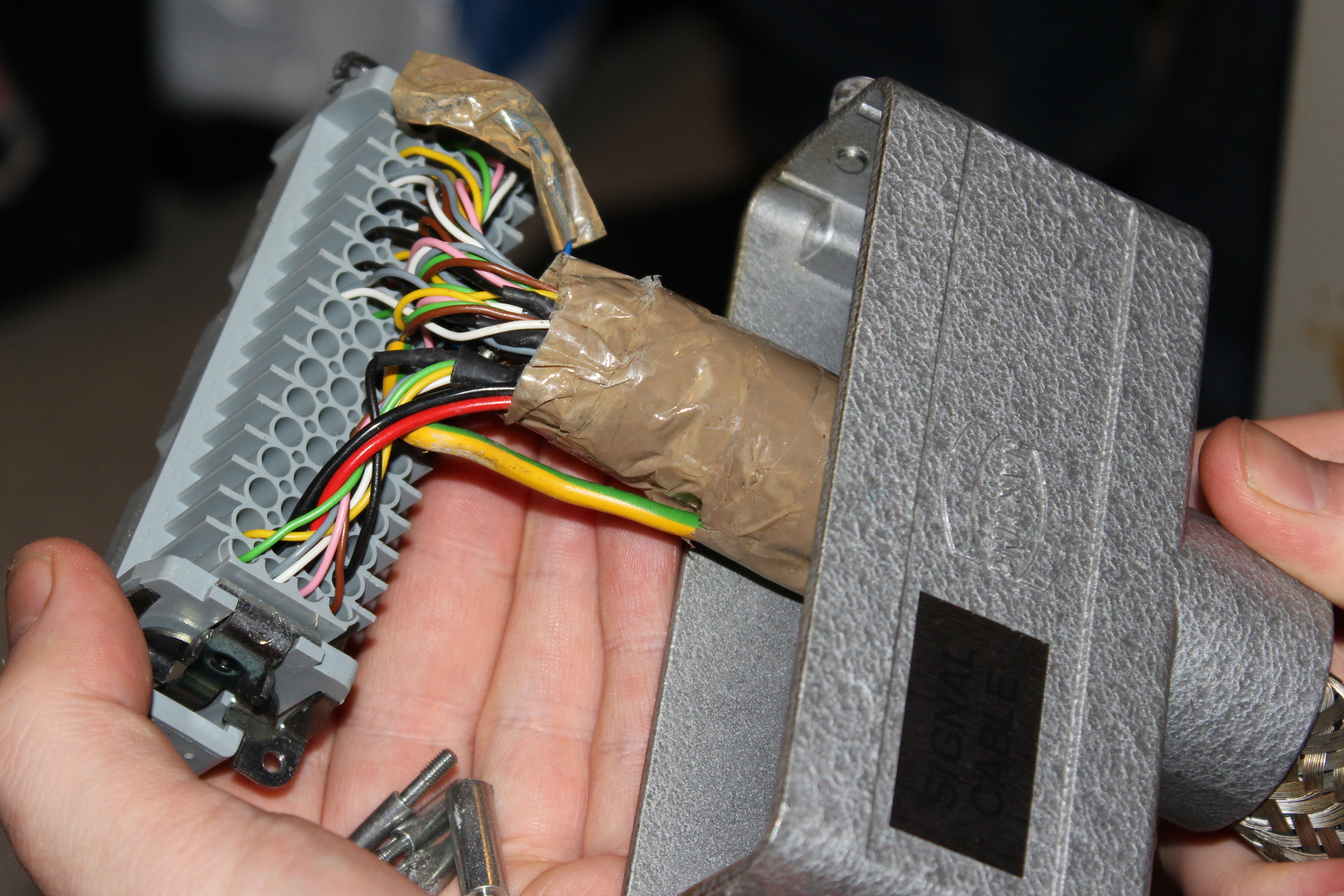
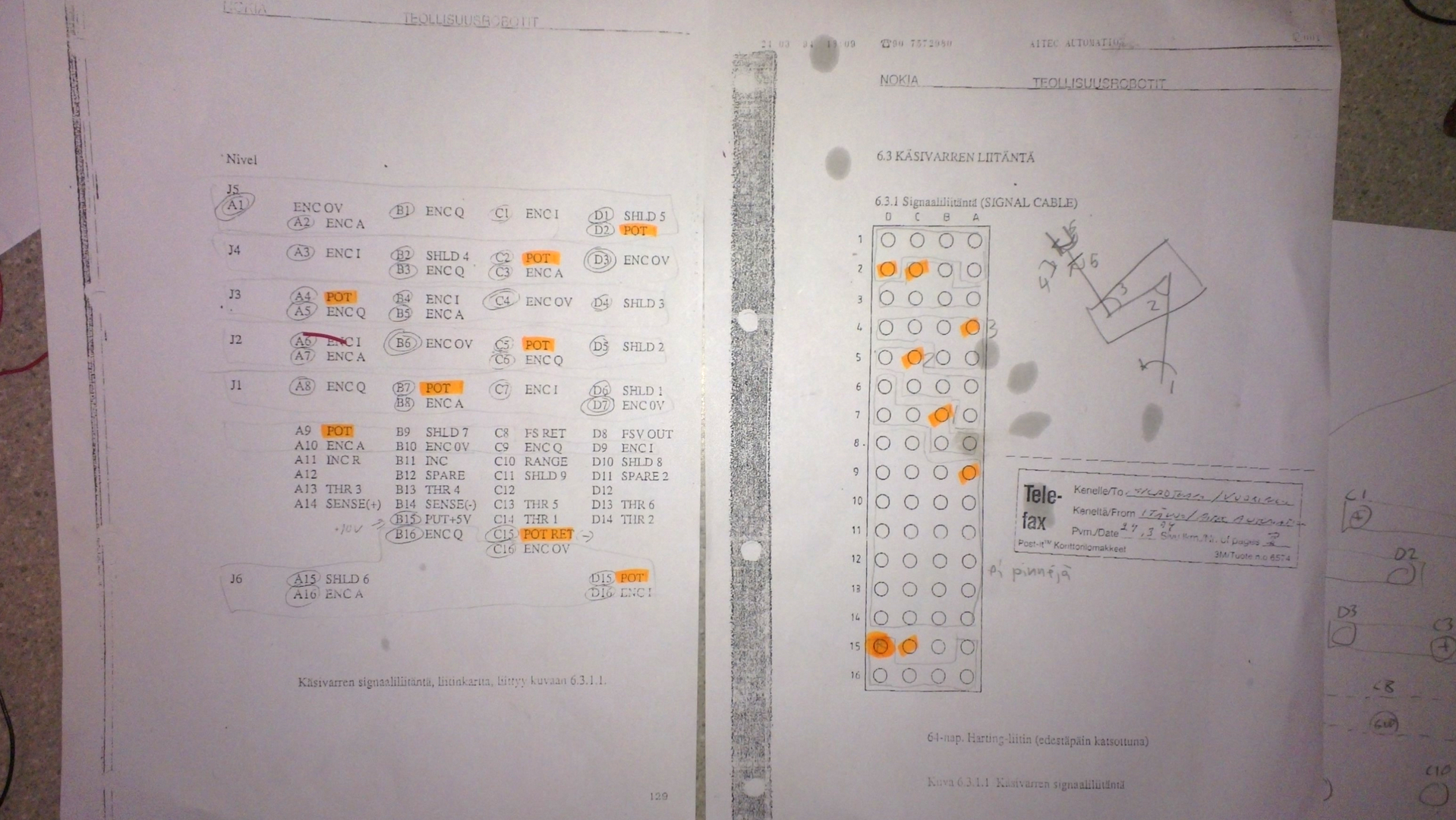
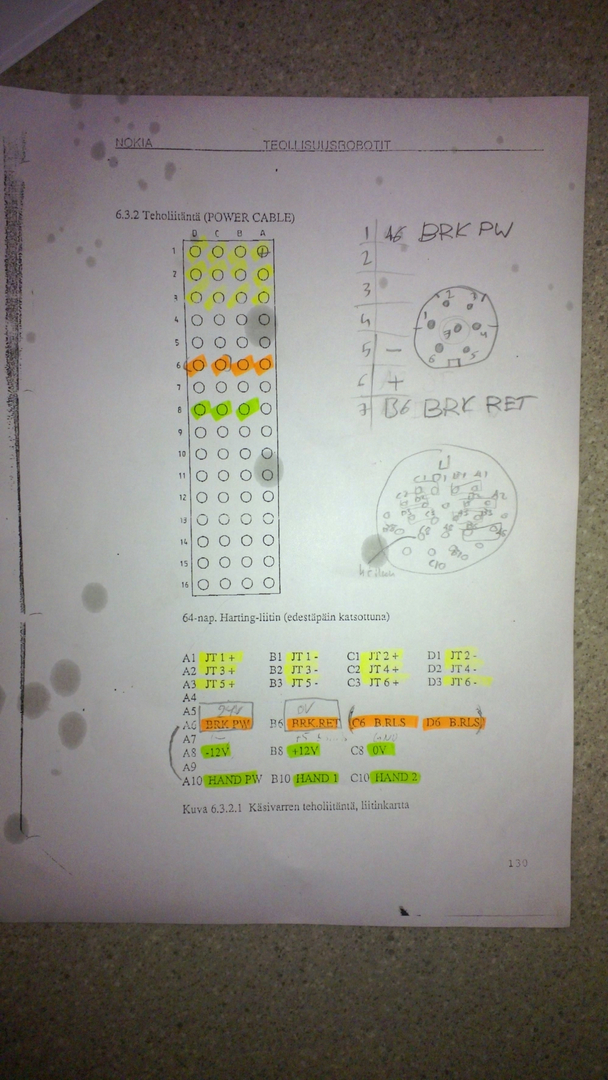
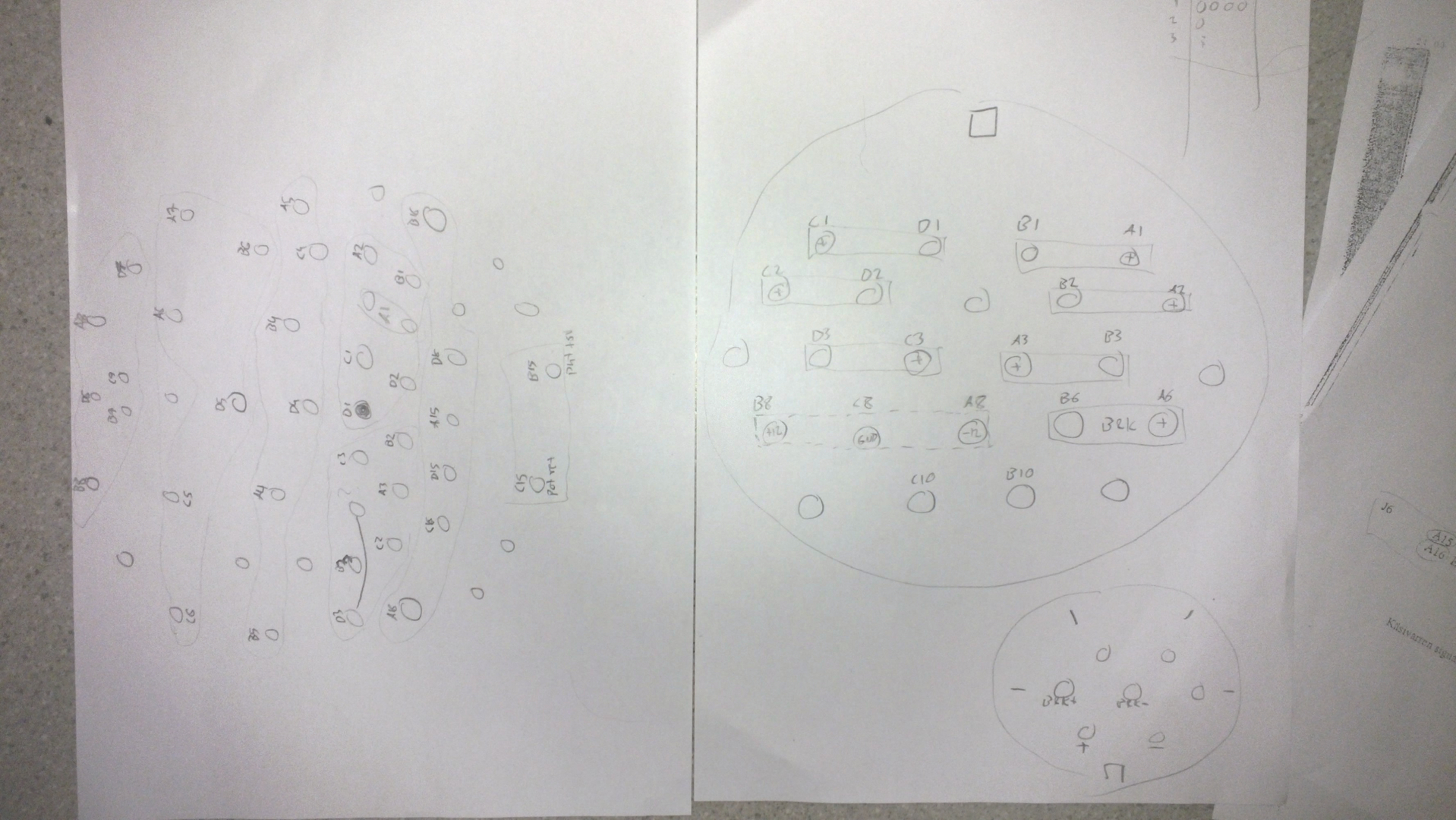
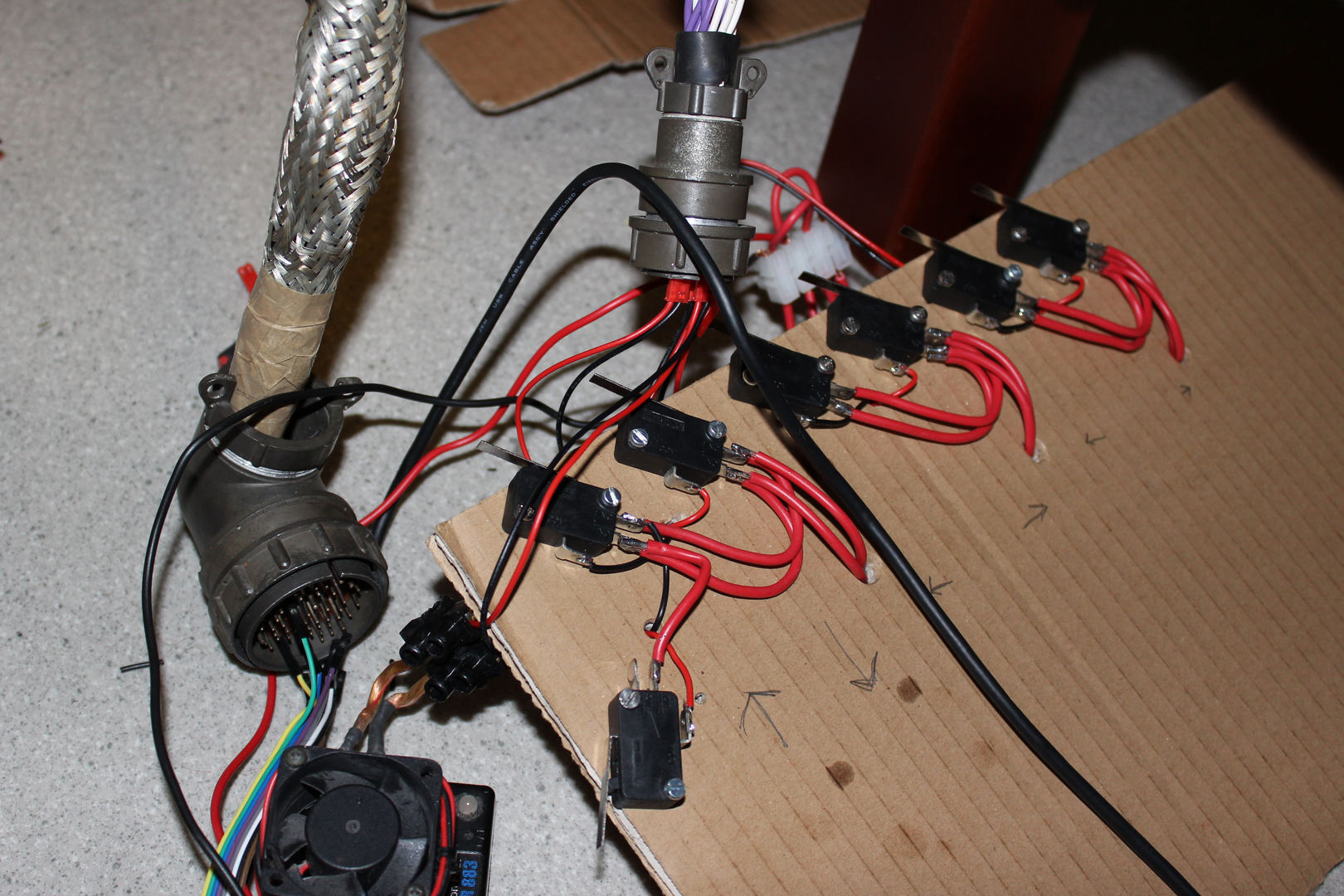
Siirryttiin tutkimaan käsivarren liittimien nastajärjestystä. Papereista löytyi liittimien pinoutit käden puolelta. Käden liittimiin menevät kaapelit löytyivät myös, mutta niiden toiseen päähän menevää vastatöpseliä ei ollut, tökittiin siis johtoja raa'asti siihen.
Johdon pinoutit päästä päähän oli helppoa piipata yleismittarilla läpi, joskin työlästä.
Väsättiin perinteiseen pahvityyliin ohjauspaneeli, h-silta kahdesta napista; nappeja riitti kolmelle moottorille sekä jarrulle. Kaikki jarrut ovat kiinni samassa kytkimessä, ja ne pitää kytkeä irti tai moottorit liikkuvat aika nihkeästi tai ei ollenkaan. Kytkintyyppi on SPDT ja kumpaankin moottorin toinen johto valitsemaan maan ja käyttiksen välillä, niin saadaan pyöriteltyä molempiin suuntiin.
Laitettiin lopulta myös arduino P-säätämään yhtä niveltä jonkun järeän RC-auton moottoriohjaimen avulla referenssinä käsin veivattava potikka. Neljän ampeerin labrapowerista ei btw. riitä jerkkua läheskään pyörittämään isoimpia moottoreita.
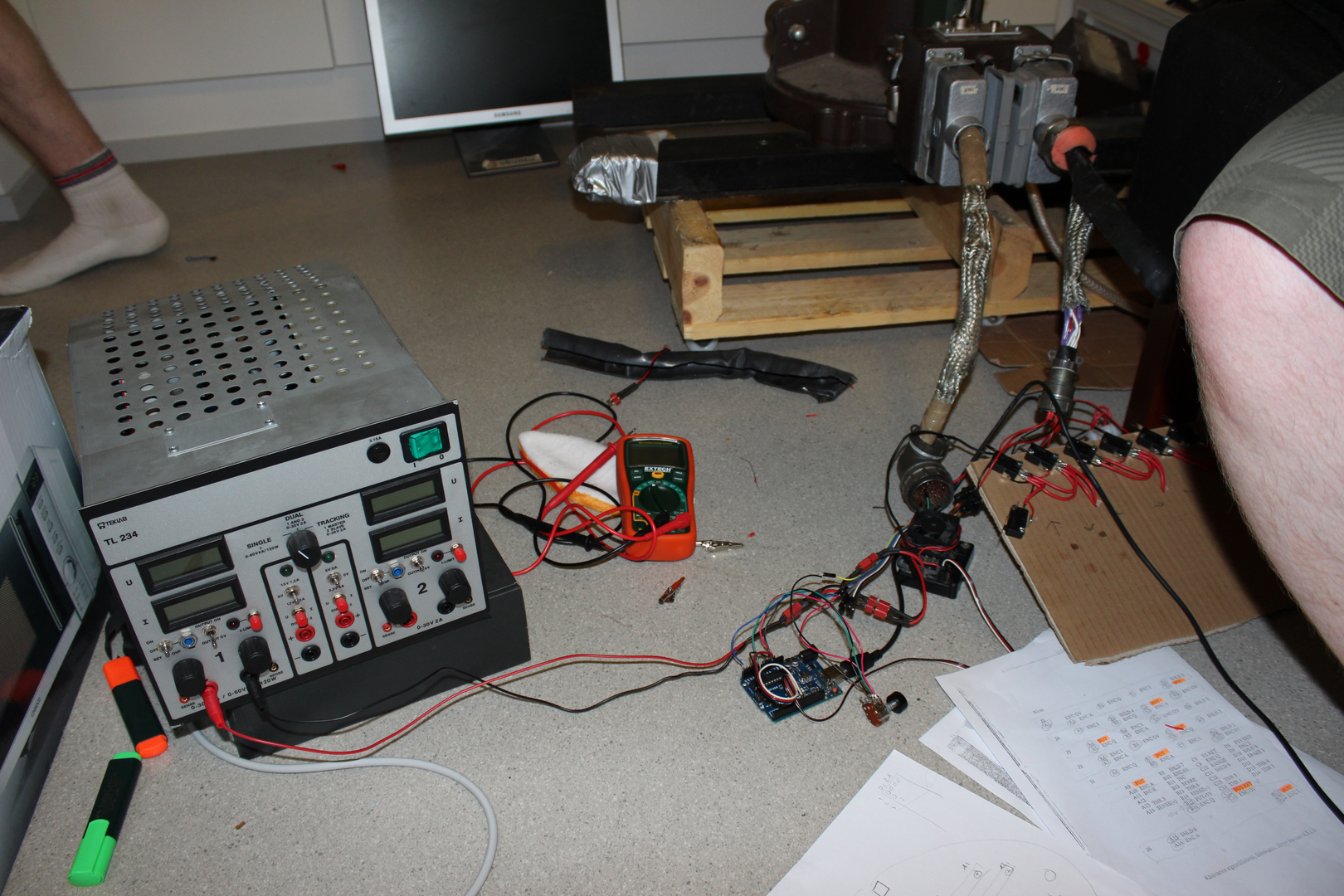
Lopulta koko perjantaiyön tapahtumat videolle tiivistettynä illasta aamuun:
Eeppistä. Tästä on hyvä jatkaa, ja kohta pitäisi jo touhutakin ettei unohdu, kun säätöillasta on kulunut jo pari viikkoa. Virtalähde ja moottoriohjaimet ovat hyvä seuraava hyökkäyskohde; äly sopii syöttää vaikka läppäristä/arduinosta jotenkin. Taisi tuossa räkissä olla joku sarjaporttikin.
4 kommenttia
Oma kommenttisi
Mielipide tämän sivun asiasta? Kirjoita toki. Älä raapusta kuitenkaan ihan asiattomia juttuja.
Jos on yksityisempää asiaa, tarkkaa kysyttävää tai aihetta pidemmälle keskustelulle, käytä yhteydenottolomaketta kommentoinnin sijaan.
Hölmöt kommentit saatetaan moderoida pois jälkikäteen.
Kiitti videon kuvaajalle, oli mukava stalkata.